FCAN簡介 - Fully Convolutional Adaptation Networks for Semantic Segmentation
Yiheng Zhang, Zhaofan Qiu, Ting Yao, Dong Liu, Tao Mei, “Fully Convolutional Adaptation Networks for Semantic Segmentation”arXiv:1804.08286
這篇是CVPR 2018的paper
以及Rank 1 in Segmentation Track of Visual Domain Adaptation Challenge 2017
程式碼:目前沒看到
CVPR 18還有一篇也是在做domain adaptation的,
Learning to Adapt Structured Output Space for Semantic Segmentation
我有介紹過有興趣的可以看這篇AdaptSegNet簡介
簡介
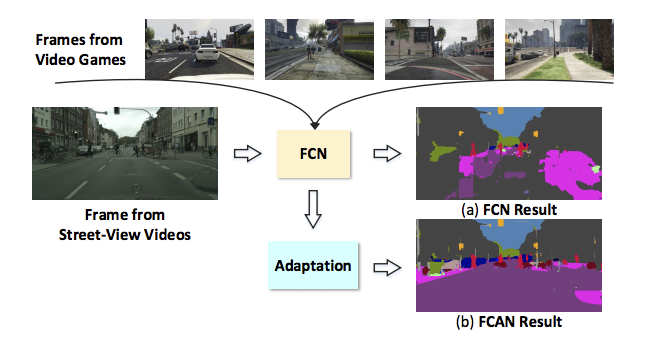
FCAN是基於FCN[1]架構作延伸,
目標是在Real world的場景中也希望有很高的準確度。
做的事情就是domain adaptation,
想法也挺簡單的有兩個概念
第一個是將輸入的圖片做一個畫風轉換,
讓source domain以及target domain的圖片看起來都跟source domain差不多。
另一個就是透過discriminator,
最終目標是讓discriminator分辨不出來,
這樣就達成了domain adaptation的任務了。
使用GTA5的影像作為訓練集,
不只有在cityscapes的資料及上測試,
還有在最近新出的Berkeley Deep Driving Segmentation (BDDS) dataset上面都有測出個成績。
問題介紹
對於semantic segmentation的任務需要基於pixel level 的資料,
但是如果要用人工標籤這些資料是相當耗時的,
因此希望可以透過遊戲中的場景的影像資料套用到實際場景。
但這件事情為什麼難呢?
你可以想像如果我們把澳洲的道路影像套用到台北來的話,
可想而知的是準確度會下降,很直覺的想法就是台北一直下雨,
整個影像看起來的樣子就是不太一樣。
但是經由上面的講法,我們不太可能為了每個城市都去搜集一份dataset,
所以整個任務的目標就是適應場景(domain adaptation)的問題。
Model架構

Model主要分為兩個部分
- AAN(Appearance Adaptation Networks)
影像轉換成類似的畫風。
- RAN(Representation Adaptation Networks)
透過discriminator做domain adaptation。
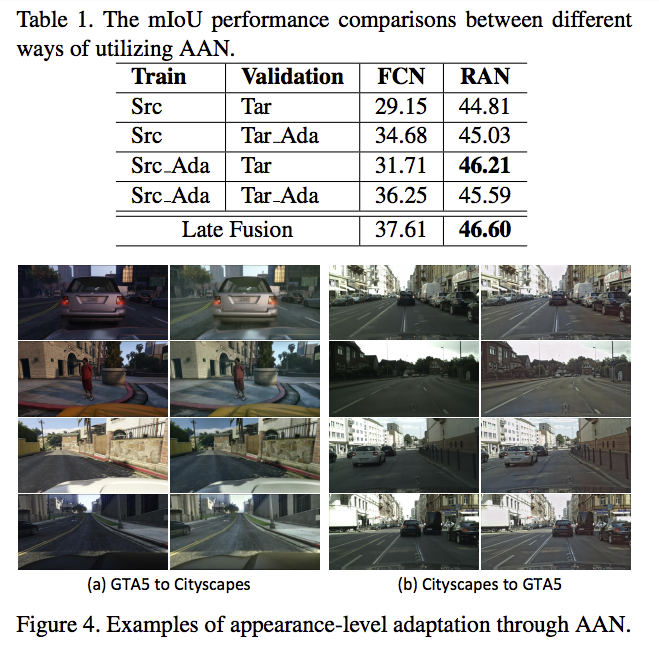
AAN(Appearance Adaptation Networks)
AAN在做的事情就是讓target domain的影像要相似source domain(GTA5)的影像,
那他怎麼做呢?他的做法也是很特別,
我們希望做的事情是圖片的物體什麼的不變(我稱之content code),
但是那個光影,各種顏色等等的要相似(我稱之style code)。
我們認為content code是屬於較高階的資訊,
那style code是屬於較為低階的資訊。
因此得出下方的結構。
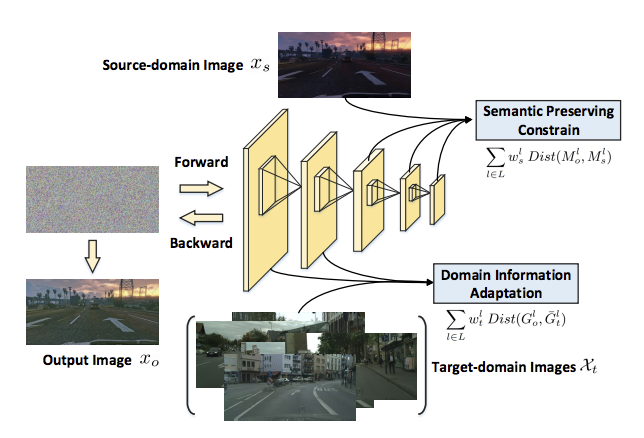
做法為給定一張source domain的圖片 = xs 以及target domain的dataset = Xt
那我們輸入的是一個雜訊,但是他會經由兩個loss function一直做修正,
- 前幾層會和target domain的圖片做loss function,
- 後幾層會和source domain的feature做loss function。
做1000次修正後,最後input的雜訊會被BP改為一張相似於source image的target domain畫風。
RAN(Representation Adaptation Networks)
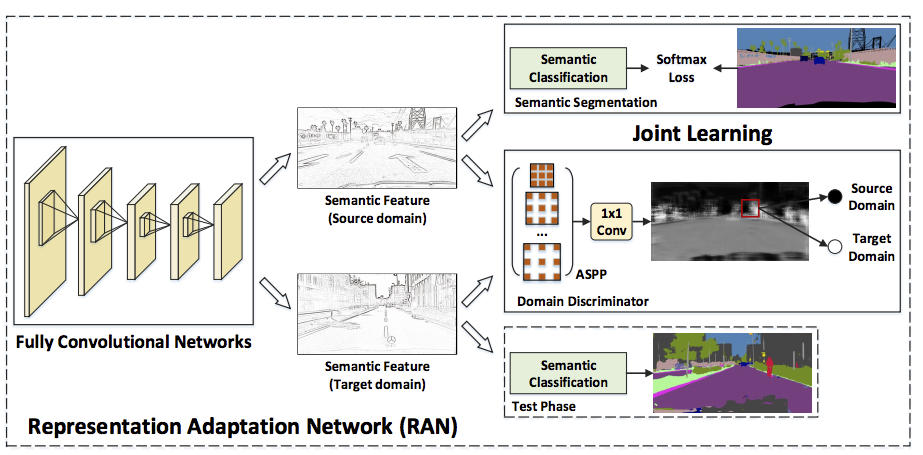
- Lseg
如果我們輸入的影像是從Source domain的話,
我們Seg Network所輸出之影像,會與Ground truth做binary cross entropy的loss。
如果你說你要把這個架構應用到實際的場景,但是自己的場景也不能做得差啊,不然怎麼說服別人。
- Ladv
這邊的discriminator是採用ASPP的架構,有興趣的可以去看deeplab v1-v3的架構,
1x1 conv是將ASPP出來的feature map concat(stacked up)後,
將原本ASPP產生的ck個channal經過一個sigmoid function後產生一張圖片(score map),
最後實驗結果有展示出採用ASPP架構和1X1 conv的確有帶來更好的準確度,
整體概念:希望Seg Network所產生出來的影像可以讓discriminator分不出來,
透過這個loss讓SegNetwork可以將target domain所生成的影像也能夠盡量的相似source domain所生成的影像。
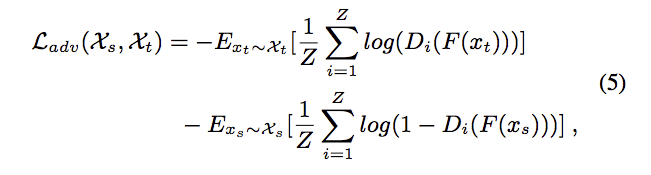
如果是target domian的image D(F(xt)) 希望它為1
如果是target domian的image D(F(xs)) 希望它為0
最終RAN的loss function為
lambda 是一個trade off的參數,原作是設定為5。
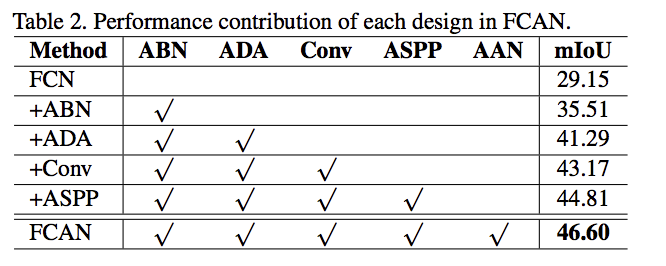
成果
ABN - 在generator中採用adaptive BN,這部分我沒有了解的很明白。
ADA - 加入Discriminator做domain adaptation的事情。
其餘的部分前面都介紹過了。
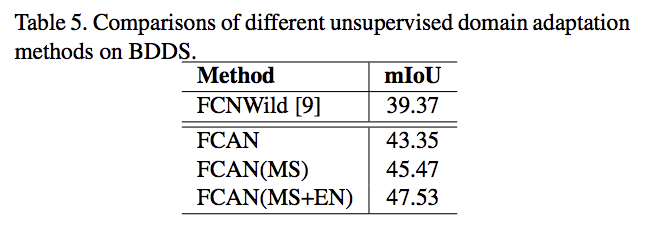
EM - 多個model做ensemble ResNet-101, ResNet152 以及 SENet
Berkeley Deep Driving Segmentation (BDDS) dataset成績
參考資料:
[1] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional networks for semantic segmentation. In CVPR, 2015.
Fully Convolutional Adaptation Networks for Semantic Segmentation